
DESIGN
Mechanical
We are currently working on our Generation 4 snakearm. The design maintains its mission statement to have large degrees of freedom, be flexible, accurate and strong. This arm is also less complicated than the previous design mechanically and proposes to incorporate a better control over the arm movement.
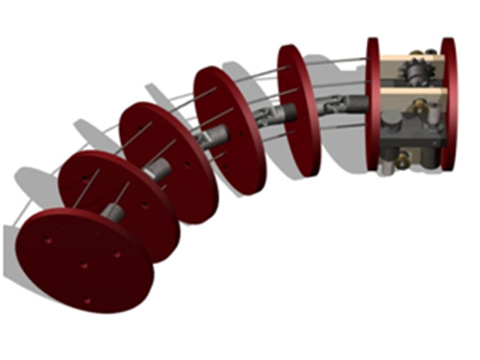
The snakearm is three (3) inches in diameter. The disks are laser cut out of acrylic. The drive frame is CNC milled out of aluminum; this is the part that holds the gears, motors, pulleys, sprockets, chains and potentiometers.
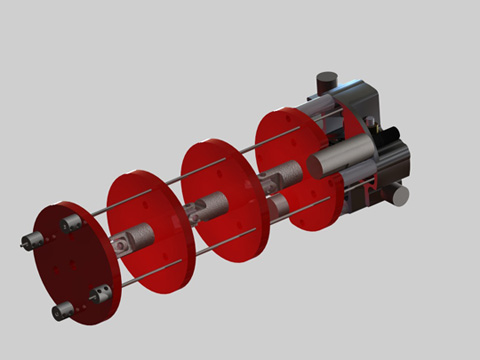
A cell is two disks and the space between them. Each cell is approximately 2 inches long. There are four cells per segment, one drive cell and three body cells. Total length of a segment is 8 inches.
Each body cell bends 20 degrees, for a total segment bend of 60 degrees. A universal joint allows the cell to bend in any direction.
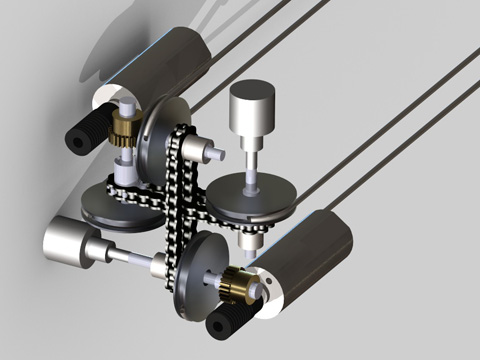
Four (4) drive cables control a segment. They are used in pairs, one side of the arm gets longer, the opposite gets shorter as it bends. One pair of cables bends the arm left and right, the other up and down. The ratio of the cable movements determines the overall direction that the segment bends. The magnitude of the cable motions determines the amount of bending in that direction.
Springs between the disks support the weight of the segment. The motors support the load at the tip and drive movement. The springs also give the arm stiffness so that does not collapse or move unpredictably.
Multiple segments will be connected end to end to form the entire arm. Each segment is self contained, except for the power and electrical wiring that must run through the arm.
For further information, please read the MechE technical report.
Software
Hydra is a new GUI, built from the ground up, but based aesthetically off of MedusaLite to be simple and intuitive. The aim of the new GUI is to not only make operating the arm easy, but make testing of controls and algorithms easy as well.
In the screenshot below you can see that if there is some sort of offset of the motors relative to the arm, you can immediately make the change in the window, instead of having to alter code.
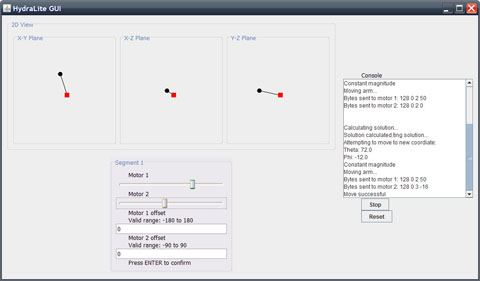
For the one-segment prototype we have developed so far, each slider simply controls one of the motors.
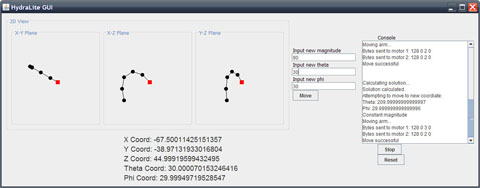
The GUI is written entirely in Java and supports both direction commands and two-dimensional individual segment control, with future camera implementation underway.
Latest News
CU Snakearm at BOOM 2009
We were well received at the BOOM with people appreciating our Robotic arm as well as our progress towards the ultimate goal of designing an arm capable of performing remote surgery.
Check out the pics of the event here.
CU Snakearm at BioExpo 2009
Our mission of producing an accurate, flexible and low-cost robotic arm able to perform remote surgery works towards solving a big humanitarian crisis by enabling the best medical support to reach the less developed parts of world. Our motto and progress were well appreciated by people from academia and the medical community.